1.概要
超小型RC機の舵駆動には、軽量化のためサーボではなくマグネット・アクチュエータが使われることがあります。
通常の受信機の信号出力はサーボ用なので、そのままではマグネット・アクチュエータを駆動できませんので、
サーボ信号をマグネット・アクチュエータ駆動出力に変換する回路を作ってみました。
2モーター差動システムにも対応できるESC(ブラシ付きモーター・ドライバ)も内蔵しています。
2.機能
●マグネット・アクチュエータ出力 2ch
●ESC出力 2ch
3.仕様(受信機含む)
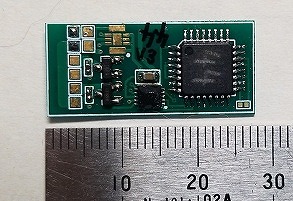
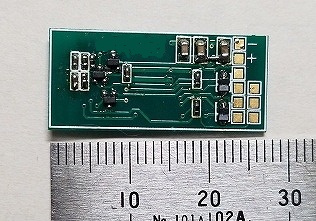
●基板外形 : 28*13*3(縦*横*高さ)
●電源電圧 : 3.7V(LiPo 1cell専用)
●重量 : 0.7g
●消費電流 : 5mA(@3.7V )
●ESC電流 : 2Amax*2
●マグネット・アクチュエータ電流 : 400mAmax
4.回路図
5.部品表
| 部品番号 |
部品名 |
仕様 |
メーカー |
備考 |
| IC2 |
マイコン |
ATmega88A |
MicroChip Technorogy INC. |
|
| IC3 |
フルブリッジ・ドライバ |
A3901 |
Allegro |
|
| Q1,Q4,Q5 |
抵抗内臓トランジスタ |
RN1102 |
東芝 |
|
| Q2~Q3 |
Nch MOSFET |
IRLML2502 |
International Rectifier |
|
| D1~D2 |
ショットキー・バリア・ダイオード |
BAT60 |
Infineon Technologies |
|
| C1,C4 |
セラミック・コンデンサ |
22uF/10V |
|
|
| C5~C10 |
セラミック・コンデンサ |
0.1uF/16V |
|
|
| R1 |
抵抗 |
22kohm |
|
|
| R2 |
抵抗 |
10kohm |
|
|
| R4~R5 |
抵抗 |
10kohm |
|
|
6.マイコンプログラム
自作する場合は、マイコンにプログラムを書き込む必要があります。
下記ファイルをダウンロードしてマイコンへの書き込みを行って下さい。
(右クリックで ”対象をファイルに保存” を選択)
RPW114.hex
書き込み時の設定
・FUSE 0xF9(Extended_byte)、0x9E(High_byte)、 0x62(Low_byte)
・LOCK 0xFF
7.説明
JP1をショートすると、2モーター差動制御になります。
2モーター差動制御では、受信機信号出力の3chと1chがミキシングされます。
JP1がオープンの場合は、受信機信号出力の3chがESCに割り当てられます。モーター出力はright,leftの2個所ありますが、どちらか片方を使ってください。(どちらでも同じ動作をします)
ESCには、低電圧検出機能があり、電源電圧が3.2V以下になると、モーターを停止させますが、電圧が回復するとモーターは自動復帰します。
8.接続
接続は下記を参照してください。
9.注意
電源電圧の低下を検出した場合、模型を速やかに回収するようにしてください。