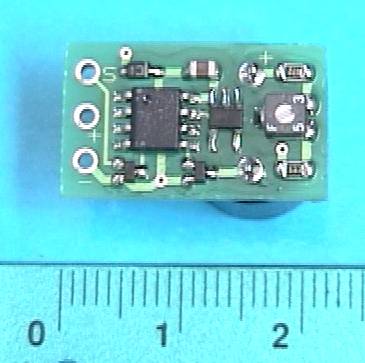
 AR50(上) |
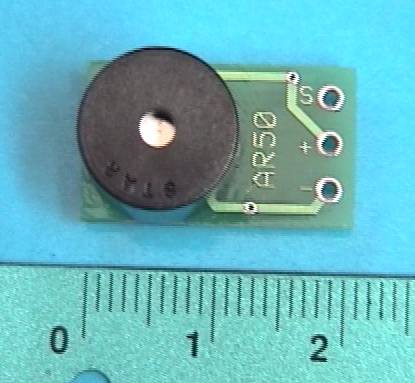 AR50(下) |
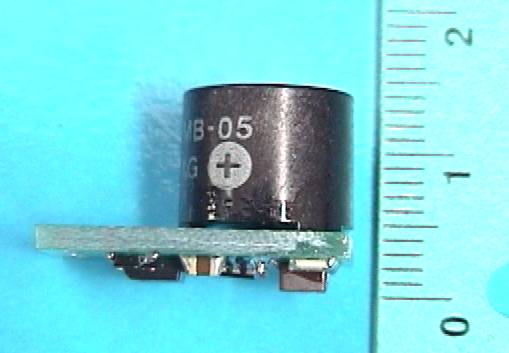 AR50(横) |
1.機能
|
2.試作品データ
|
3.回路図
|
| 4.部品表 IC1: PIC12C509Aー04/SN (300円) IC2: S−80725SN−DN(100円) Q1 : RN1105 (20円) Q2 : RN1102 (20円) D1 : 1SS352 (20円) C1 : 0.47μF/25V 2012タイプ チップコンデンサ (40円) R1 : 5.1KΩ 2012タイプ チップ抵抗 (10円) R2 : 13KΩ 2012タイプ チップ抵抗 (10円) VR1 : 5KΩ ST−3型半固定抵抗 (100円) BZ1 : TMB-05(250円) 基板 : (200円?) ( )内は、参考価格 |
| 5.プリント基板 | |
 AR50 部品面パターン |
 AR50 ハンダ面パターン |
 AR50 部品面実装図 |
 AR50 ハンダ面実装図 |
| 6.マイコン プログラムのダウンロード 自作する場合は、マイコンにプログラムを書き込む必要があります。 右記のプログラムをダウンロードし、解凍後に書き込みを行います。 ※コンフィグレーション ビットをマニュアルで設定する場合には下記のように設定して下さい。 oscillator : internal rc watchdog timer : on code protect : off master clear : internal |
AR50V00H.lzh |
| 7.説明 機体発見ブザーにバッテリーの電圧低下検出機能を追加しました。 バッテリー電圧の監視は、電圧低下検出ICを利用しています。今回使用したのは、検出電圧が2.5Vのものですが、3V以下のものであれば、R1とR2の変更で適用可能です。パーツ選定の注意点として、出力形式がオープンコレクタ(又はオープンドレイン)を選ぶようにします。CMOS出力形式のものでは、抵抗で分圧する場合は、うまく動作しません。 バッテリーの種類、容量、負荷電流によって検出電圧の最適値は異なりますので、VR1によって調節出来るようにしました。回路図通りの定数で作った場合は、3.2V〜4.4Vまで可変できます。設定電圧は、高くし過ぎると、まだ十分にバッテリー残量があるのにサーボを動かすたびにブザーが鳴ってしまいます。逆に設定電圧を低くし過ぎるとバッテリー電圧低下検出をしたとたんにノーコンという危険があります。 通常の機体発見ブザーの機能は、信号パルス幅が約1.25msec以下になるとブザーが断続音で鳴るようにプログラムされています。また、信号パルスが無くなってもブザーが鳴ります。 ブザーは、5〜6Vの自励式のものなら他のものでも使用できます。 本回路はマイコンを使っていますので、プログラムをダウンロードしてマイコンへの書き込みを行って下さい。 |